
Research
SCRAM: Soft, Curved, Reconfigurable, Anisotropic Mechanisms

Introduction: Soft Curved Reconfigurable Anisotropic Mechanisms (SCRAMs) are a new class of soft robotic technology that will enable new multi-functional soft robots with reconfigurable actuation and shapes. The key to the proposed technology is the ability to change the mechanical properties of a thin-walled structure by changing its local curvature. For example, curving a flat sheet of paper along one direction greatly increases its stiffness in the other two directions. Exploiting the coupling between curvature and mechanical behavior in planar materials will enable the design, modeling, and control of reconfigurable soft robots.
Funding: NSF EFRI C3 SoRo Award #1935324 link
Canal Maintenance and Cleaning via Autonomous Fish-Inspired Robots
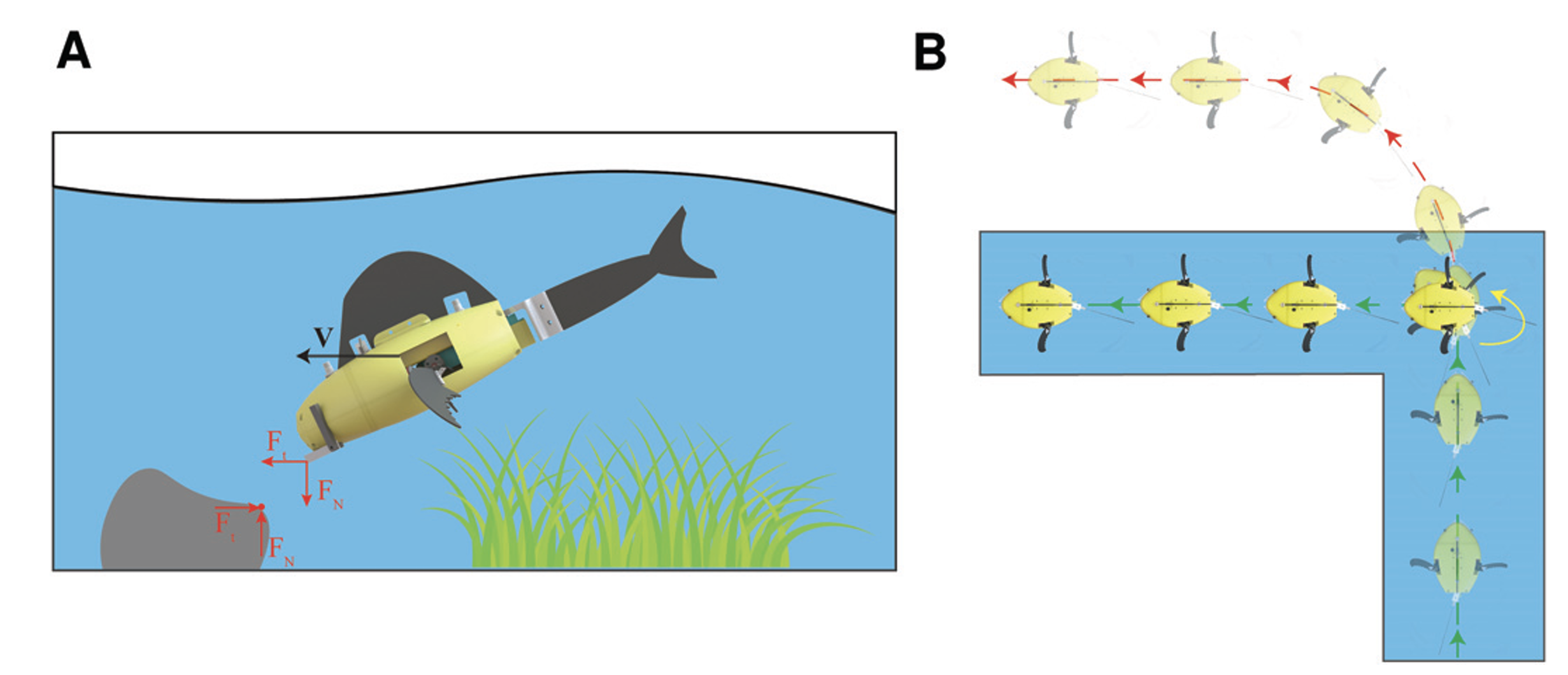
Introduction: In this project, the goal is to build an AUV that explores the water canals and performs cleaning of these canals as necessary. We have selected the fin propulsion mechanism as the propulsion system for our AUV. Essentially, we are designing and building an underwater robot that will use a fin to move inside water. Our capability of using a laminated robot, will give us more advantage in easily gain the required stiffness in the tail in order to overcome the water drag.
Funding: Partially provided by SRP.